El Motor DC con encoder y caja reductora JGA25 es ideal para proyectos de control de velocidad o posición en lazo cerrado, como: péndulo invertido, robot móvil autónomo, servomotor DC, faja transportadora y proyectos exigentes donde la fuerza y velocidad son un factor clave. El dispositivo está compuesto de tres partes: el motor DC, la caja reductora y el encoder de cuadratura. El motor DC trabaja a un voltaje nominal de 12V. La caja reductora de metal cumple la función de reducir la velocidad de entrada y aumentar el torque de salida. El motor y la caja reductora están fabricados en metal para una mayor durabilidad y resistencia. El encoder sirve como un sensor de velocidad y sentido de giro, funciona utilizando dos sensores de efecto Hall.
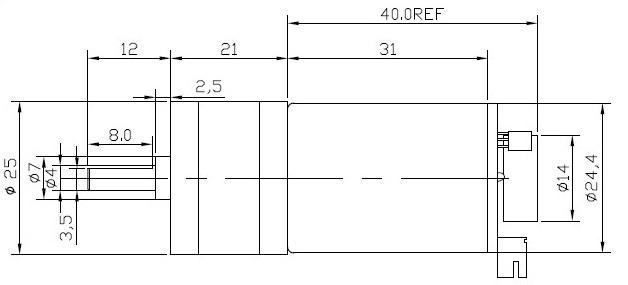
En este caso cuenta con un motor DC de 12V de alta potencia, una caja de engranes de 82RPM, cuyo diámetro es de 25mm y con un eje de salida en forma de «D» de 4mm de diámetro.
Además cuenta con un decodificador en cuadratura o encoder efecto hall que le facilita la lectura de los pulsos por revolución. El encoder está conformado por un disco magnético multipolo unido al eje del motor DC y por dos sensores de efecto Hall. Cuando el motor DC gira, el disco magnético también gira y los polos magnéticos del disco van pasando frente a los sensores hall que emiten un pulso digital («tick») cada vez que detectan un polo magnético positivo. Como el disco posee 22 polos alternados, entonces por cada vuelta cada sensor hall emitirá 11 pulsos o «ticks». Los dos sensores hall (A y B) están desfasados 90º y sus salidas tipo onda cuadrada también estarán desfasadas 90º, a esto se le conoce como encoder de cuadratura. El desfase de ondas es útil para detectar el sentido de giro del motor, pues al girar en un sentido la onda A precederá a la onda B y en el otro sentido de gira la onda B precederá a la A.
Especificaciones
Voltaje de alimentación del motor: entre 5 V y 18 V
Voltaje de alimentación del encoder: 3.3V – 5V DC
Voltaje nominal: 12 V
Velocidad de funcionamiento libre a 12 V: 82 RPM
Corriente de funcionamiento libre a 12 V: 50 mA
Corriente de bloqueo a 12 V: 1200 mA
Torque: 2.88 kg-cm.
Relación de engranajes: 1: 103
Tamaño del reductor: 23 mm
Resolución del encoder (Hall): 1133PPR
Peso: 89 g