Resistencia variable con la fuerza FSR 406 cuadrado, de película delgada de polímero. A mayor fuerza aplicada mas baja es su resistencia. Rango de medida optimizado para aplicaciones de control por toque humano. De fácil utilización e integración sencilla.
Es un componente pasivo que varía la resistencia cuando se ejerce una presión o fuerza sobre su área sensible, esta diseñado para detectar presión y fuerza, estos tipos de sensores son muy fáciles de utilizar e implementar en todo tipo de proyectos de electrónica. .Modelo con terminales soldables.
- Rango de fuerza: 0.2 N a 20 N (20.4 gf a 2.039 kgf)
- Señal de salida analógica
- Resistencia sin actuación: > 10 MΩ
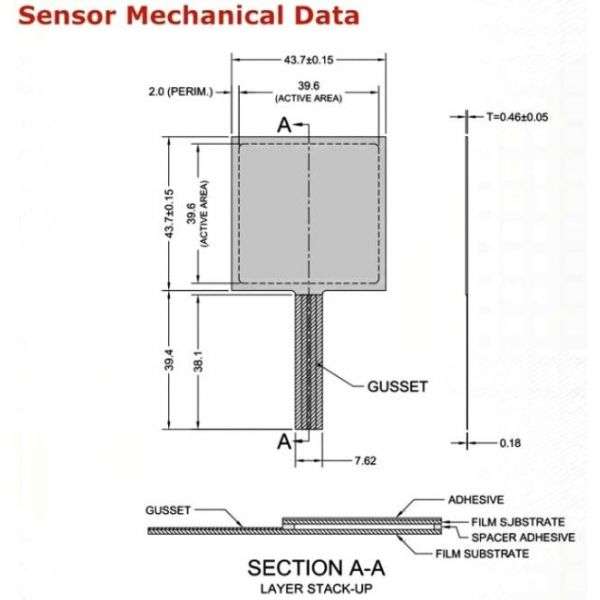
- lado total: 43.7 mm
- Lado área sensible: 39.6 mm
- Ultradelgado: grosor de 0.46 mm
- Recorrido para activarse: 0.15 mm
- Auto adhesivo
- Vida útil: 10 000 000 de activaciones
- No genera EMI, no es sensible a ESD
Aplicaciones:
- Medición cualitativa de la fuerza
- Control por toque, teclados
- Construcción de interfaces mas intuitivas al poder evaluar mayor o menor fuerza del toque y/o toque accidental o intencionado
- Aplicaciones donde se requiere diferenciar entre un toque o un agarre continuo (por ejemplo para mejorar la seguridad de una máquina o herramienta)
- Detección de presencia, movimiento o posición de una persona o paciente en una silla, cama, camilla, o dispositivo médico, etc.
- Se pueden emplear múltiples sensores para determinar el centroide de fuerza
- Robótica
- Controles de juegos, instrumentos musicales, controles remotos, dispositivos médicos, etc.
- Entre muchos otras aplicaciones de medición de fuerza o peso


